Building Instructions -
Filters:

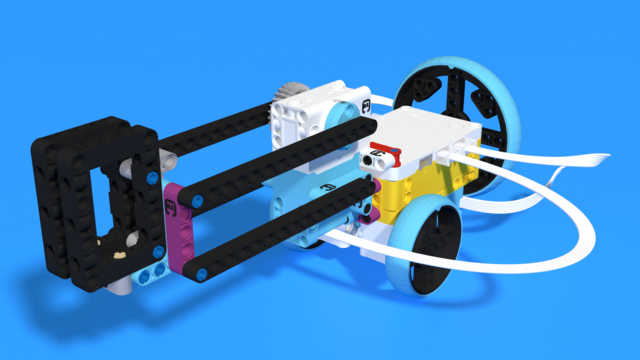
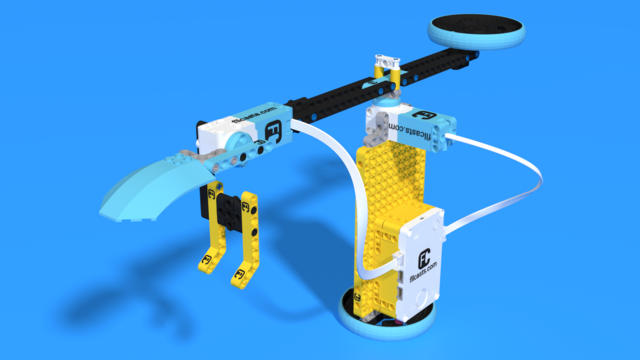
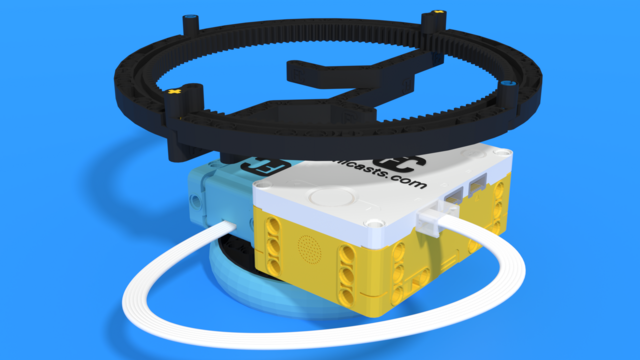
Onwards and Cupwards: LEGO SPIKE Prime Cup-Lifting Robot
This robot is designed to lift a cup smoothly while keeping it upright. With a motor attached to the side of the Hub, the robot can raise the cup to different angles.
With a few adjustments, you could even replace the LEGO cup and try lifting a real one. Just be careful with liquids - the robot doesn’t enjoy drinks as much as you do!
- #4442
- 30 Mar 2026
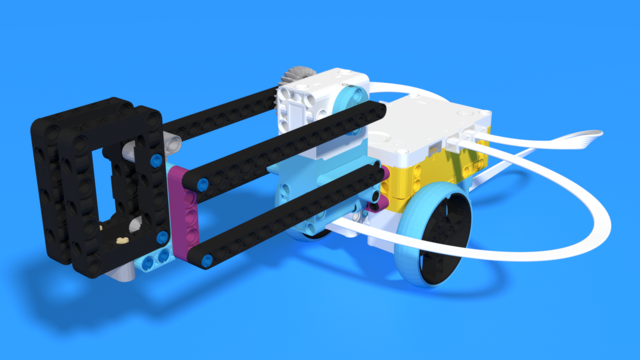
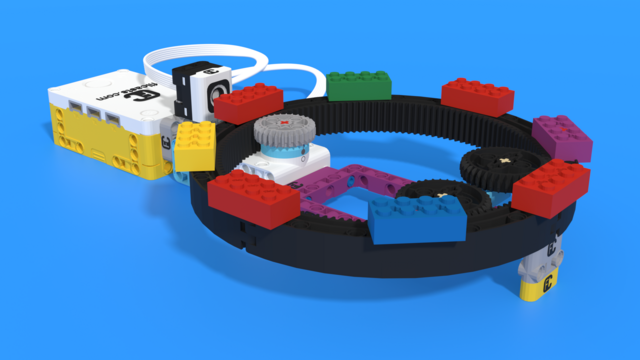
Onwards and cupwards with wheels - LEGO SPIKE Prime cup lifting robot
This instruction adds to the Onwards and cupwards robot.
- #4409
- 27 Mar 2026
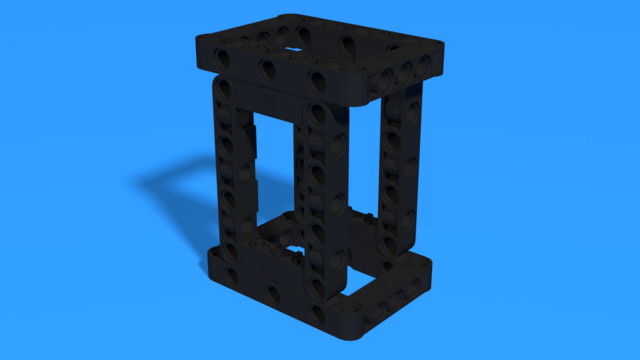
LEGO Storage Box with a Long Body
This storage box is designed for use in robot missions. Its long shape makes it easy to grab and transport using a wide variety of robot attachments and grabber designs.
- #4376
- 25 Mar 2026

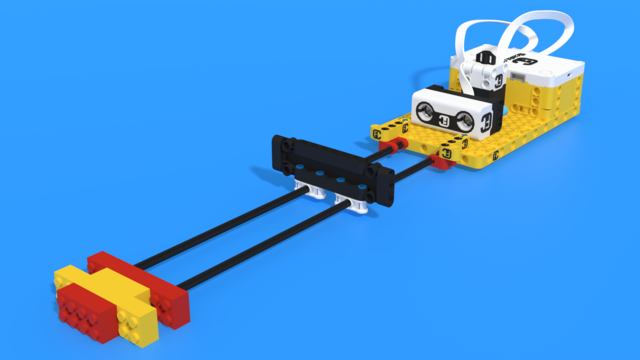
Racer - LEGO SPIKE Prime race car
Building instructions for a steering car. The front wheels are steered by a medium motor, while both rear wheels are driven by a single large motor.
- #4343
- 24 Mar 2026

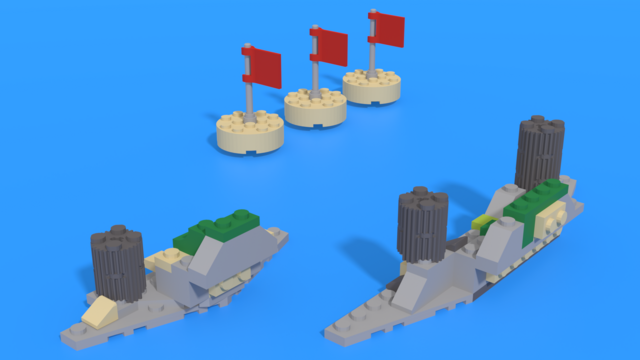
Minto - LEGO SPIKE Prime volleyball robot
Minto (from the English word Mintonette) takes its name from the earliest version of volleyball.
This robot can move only forward and backward using one medium motor. It can also shoot a ball using another motor and a clever mechanism. It even has a net, allowing it to catch balls from other robots.
- #4310
- 21 Mar 2026

Xogo - LEGO SPIKE Prime relay game robot
Xogo means “game” in Galician.
The robot moves using two medium motors. It has a distance sensor in the front to detect the next robot and a force sensor in the back to detect the robot behind it in the relay. Build two or more robots and you can create a whole relay!
- #4277
- 05 Mar 2026

Malen - LEGO SPIKE Prime telephone game robot
Malen comes from Malentendu, which means misunderstanding in French.
The robot has a color wheel with 4 colors in the back and a color sensor in the front. When you show a color to the color sensor, it can show it back. You can chain multiple of these robots to make a telephone game!
- #4244
- 23 Feb 2026
Grus - LEGO SPIKE Prime crane robot
Grus, from Latin, means Crane.
The Crane uses one motor to turn the hand and one motor to hold the ball. You need to balance the jib first? What can you add to it?
- #4178
- 25 Jan 2026

Levi - LEGO SPIKE Prime sorting robot
Levi comes from levitama, which means distribute in Estonian.
This robot uses a color sensor to detect the color of a plastic ball. Then, according to the color of the ball, the robot sorts it to the correct side.
- #4211
- 25 Jan 2026
Mello - LEGO SPIKE Prime dj set robot
Mello is named after the famous DJ "Marshmello".
This robot is designed to work like half of a DJ set. It speeds up or slows down a melody based on the rotation of the motor. Can you create some cool remixes with it?
- #3553
- 16 Sep 2025
Chromagraph – LEGO SPIKE Prime Vinyl Record Player Robot
Chromagraph is a play on the original name of the record player, the "Phonograph," which comes from the Greek phono (sound), graph (writing), and chroma (color).
This robot is designed to work similarly to a record player. It has a rotating “disc” with different colored bricks that are read by the color sensor. The robot then plays a sound for each color. Can you create a melody?
- #3554
- 16 Sep 2025

Paga - LEGO SPIKE Prime violin robot
Paga is named after the famous violinist Niccolò Paganini.
The robot is designed to resemble a violin. The faster the motor turns, the higher the pitch it produces. Let’s see if you can play a concerto on it!
- #3552
- 16 Sep 2025

Sympho - LEGO SPIKE Prime music box robot
Sympho is named after Symphonium, the first company to manufacture music boxes.
The robot uses a color sensor to detect whether the box is closed. When you open it, the robot can play music and spin something with the motor. You can build anything you like on top!
- #3782
- 16 Sep 2025
Carlos - LEGO SPIKE Prime guitar robot
Carlos, named after the famous Mexican guitarist Carlos Humberto Santana Barragán.
The robot uses the distance sensor to determine the pitch of the sound and the force sensor to play the sound. You can shred pretty good with this one!
- #3551
- 16 Sep 2025

LED strip display program
Download button at the bottom.
This is a program we created for the LED strip display course.
#include <Adafruit_NeoPixel.h> #define LED_COUNT 20 #define StripPin A2 #define HallEffectSensorPin 6 #define HallEffectGNDPin 5 #define HallEffectVCCPin 4 int startSeconds = 20; int startMinutes = 10; int startHours = 1; int secondsArrow; int minutesArrow; int hoursArrow; int arrowPosition; int hallSensorPastState = LOW; int hallSensorRead; int timeForOneRotation = 1; unsigned long RPMTimer = millis(); Adafruit_NeoPixel leds = Adafruit_NeoPixel(LED_COUNT, StripPin, NEO_GRB + NEO_KHZ800); int color[3] = {255, 100, 150}; int secondsColor[3] = {255, 0, 0}; int minutesColor[3] = {0, 255, 0}; int hoursColor[3] = {0, 0, 255}; void setup(){ pinMode(HallEffectSensorPin, INPUT); pinMode(HallEffectGNDPin, OUTPUT); pinMode(HallEffectVCCPin, OUTPUT); digitalWrite(5, LOW); digitalWrite(HallEffectVCCPin, HIGH); leds.begin(); leds.setPixelColor(19, color[0], Color[1], color[2]); } void loop(){ RPMUpdate(); ClearLedsWithoutTheLastOne(); arrowPosition = StateFrom60(); secondsArrow = ((int) floor(( millis() / 1000) + startSeconds) % 60); minutesArrow = ((int) floor(( millis() / 60000) + startMinutes) % 60); hoursArrow = ((int) floor(( millis() / 3600000) + startHours) % 12) * 5; if (arrowPosition == secondsArrow){ for (int i = 0; i < LED_COUNT - 3; i ++){ leds.setPixelColor(i, secondsColor[0], secondsColor[1], secondsColor[2]); } } if (arrowPosition == minutesArrow){ for (int i = 0; i < LED_COUNT - 6; i ++){ leds.setPixelColor(i, minutesColor[0], minutesColor[1], minutesColor[2]); } } if (arrowPosition == hoursArrow){ for (int i = 0; i < LED_COUNT - 10; i ++){ leds.setPixelColor(i, hoursColor[0], hoursColor[1], hoursColor[2]); } } if (arrowPosition % 5 == 0){ leds.setPixelColor(18, color[0], color[1], color[2]); leds.setPixelColor(17, color[0], color[1], color[2]); } leds.show(); } void RPMUpdate(){ hallSensorRead = digitalRead(HallEffectSensorPin); if(hallSensorRead != hallSensorPastState){ if(hallSensorRead == HIGH){ timeForOneRotation = millis() - RPMTimer; RPMTimer = millis(); hallSensorPastState = HIGH; } else{ hallSensorPastState = LOW; } } } void ClearLedsWithoutTheLastOne(){ for(int i = 0; i < LED_COUNT - 1; i ++){leds.setPixelColor(i, 0);} } int StateFrom60(){ return (int)floor(((millis() - RPMTimer) * 60) / timeForOneRotation) % 60; }
- #3749
- 13 Sep 2025