Carnival - LEGO Mindstorms EV3 competition Box Robot
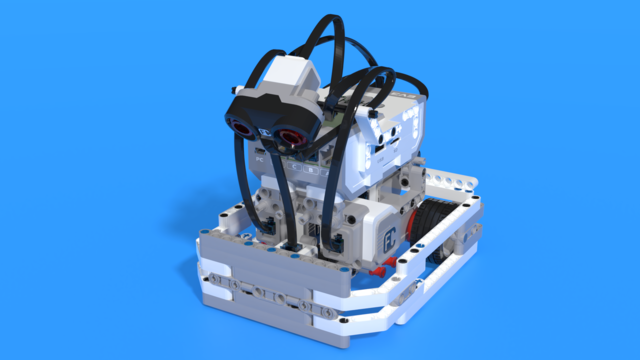
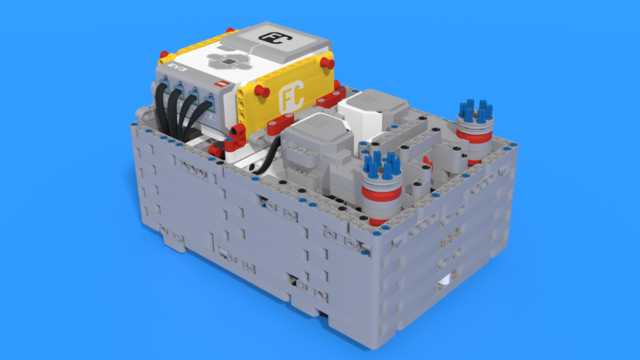
This is a LEGO Mindstorms EV3 competition robot used in FIRST LEGO League Season 2018-2019 Into Orbit following a Box Robot principle. The robot has passed through the following competitions in Brazil:
Local competition in scho
Regional: Northeast
National: Rio de Janeiro
International: Uruguay
The robot is an modular construction that you could easily build upon. It is not entirely "clean" as it has parts of it not optimezed as in the other box robots, but it is a nice example and a great work from the FLL team.
- #755
- 25 Apr 2019