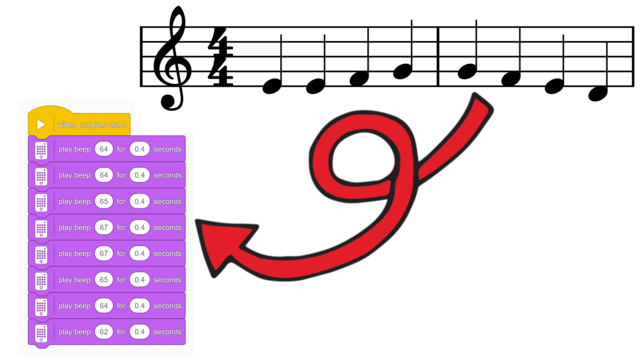

Как да преведем музикални ноти в SPIKE Prime софтуер
Искате ли да програмирате любимата си музика на SPIKE Prime? Ето как!
- #2496
- 16 Sep 2025
Искате ли да програмирате любимата си музика на SPIKE Prime? Ето как!

In this part 2 of the LEGO video tutorial we accomplish the pull part of the M03 Energy storage from FIRST LEGO League 2022-2023 SUPER POWERED. Part 1 was about precise dropping, part 2 is about pulling as the model requires it

This is the first part of accomplishing M03 Energy Storage with the Kriket Box Robot. In this tutorial we show how to Drop the energy units in the storage. The second part will focus more on how do we pull the element from below the energy storage.

In this video tutorial with LEGO SPIKE Prime we accomplish M02 Oil Platform from the FIRST LEGO League 2022-2023 SUPER POWERED robotics competition. We use the Kriket box robot and an attachment that allows us to lift. The actions of the mission is between Lift and Push, be because it is vertical.. we choose Lift. Checkout the full tutorial for all the 3 missions in a single run.

This is a programming video tutorials. It uses LEGO Education Word Blocks which is the scratch version. We enter into details of how to accomplish missions in a tight spot, how to align the robot and how to make it repeatable.

This 10 out of 10 tutorials is about consistency and reliability of the robot when accomplishing 5 missions in a row. We explore how we move between mission models. The programming is in the previous tutorial, here we look and discuss the behaviour of the robot

With this first tutorial on the Motion Sensor in the LEGO MINDSTORMS Robot Inventor course we demonstrate the basic algorithm for moving in a straight line with the Motion Sensor. From here all the other algorithms are modifications, and if you know the basic it will be easier to tweak the behavior for your particular challenge

This is a 10 runs tutorial that demonstrates how the accuracy of the robot improves when we use slow acceleration vs fast or default acceleration. Note that the improvement is small. This is not an accurate and consistent robot. No. This is a robot that is all but accurate or consistent. It does not use sensors and you should use sensors. But it is a teaching/demonstration moment for everybody to seen what is it that you can expect if you don't use sensors.
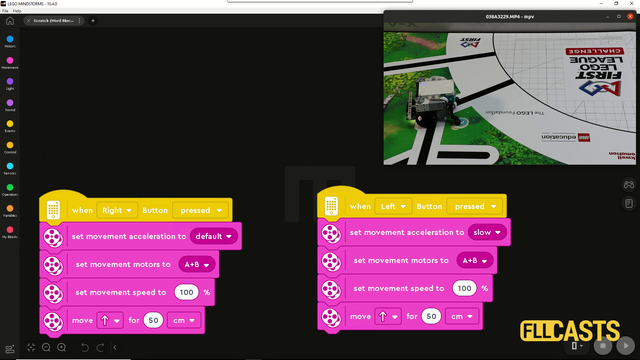
In this video tutorial we are demonstrating the impact of slow and fast acceleration on the robot. In the Scratch program there is an acceleration block for fast and slow acceleration. The robot behaves in different way. Let's explore them so that you know what to use for FIRST LEGO League competitions.

This is a tutorial with 10 runs - 5 of them are slow and 5 of them are fast and we measure how accurate the robot is each time. How consistent is it? Can it arrive consistently on a specific location on the field without the use of the sensors? The quick answer is - No, it can not. But let's see it life

In this video tutorial we use a LEGO MINDSTORMS Robot inventor robot and we do an experiment and a demonstration with it. We demonstrate what is the difference in the consistency and accuracy of the robot when we move slow and when we move fast. For FLL, WRO competitions there is always this balance between moving fast and moving slow.

This is the first video tutorial from our course on LEGO MINDSTORMS Robot Inventor programming. In this tutorial we will start with how do we move without sensors. We will demonstrate a simple program. Our hope with this tutorial is that you will see why moving without sensors is a bad approach.

This animation demonstrates the principle of aligning to a line with two color sensors and a LEGO Mindstorms Robot Inventor robot. This is a useful concept for FIRST LEGO League competitions where you want to know exactly where you are on the field and to achieve consistent behavior. In the course lesson you will also find a live video tutorial where we enter into more details about aligning. We align the robot to a line by moving both sensors slowly until they both see a black line. When one of them sees the line we move only the other. At the end we return the first sensor back.

In this short animation we demonstrate how the LEGO Mindstorms Robot Inventor Distance sensors could be attached to the robot and then use to stop at distance from a wall. This wall could be the border of the field or another mission model. We need an attachment, we need a sensor and we need the robot. In the live video in the lesson we enter into more details and explanations of how the sensor is used. Programs for the distance sensor are provided in the lesson and in the LEGO Mindstorms Robot Inventor Programming course we enter into more details about how to program the distance sensor

In this video tutorial we discuss probably the most useful principle that we've found for FIRST LEGO League competitions and this is how to align to a line with two color sensors. We use the LEGO Mindstorms Robot Inventor for a quick demonstration of the principle. In the LEGO Mindstorms Robot Inventor Programming course we enter into more details of how exactly we program the sensors. The current tutorial demonstrates the use of such a program and makes clear why this could be very useful and is a must for any well prepared team and wants to achieve a good score on the competition.

In this video tutorial we demonstrate a few ways to use the Distance sensor from the LEGO Mindstorms Robot Inventor on FIRST LEGO League competitions. We don't enter into the details about programming as we do in the LEGO Mindstorms Robot Inventor Programming course, because here we demonstrate the behavior of the robot when the sensor is use and we make the argument that you should always use sensors at FIRST LEGO League competitions

In this video tutorial we try to move forward with a LEGO Mindstorms Robot Inventor robot and we try to keep a straight line using the Motion Sensor. Without entering into the details of the programming we demonstrate what is the behavior of the robot when trying to keep a straight line with the Motion Sensor while we are participating in a FIRST LEGO League competition.

In this video tutorial we demonstrate the behavior of a LEGO Mindstorms Robot Inventor robot when we use the Motion sensor. The Motion sensor was also referred to as Gyro sensor in previous versions of the LEGO Mindstorms Robot. We do not enter into the details of the programming and you can download the programs from the course lesson, but we make a demonstration of how the robot turns to about 95 degrees when we try to turn it to 90 degrees, we explain why and we suggest a way to improve the behavior of the robot.

Programming the LEGO MINDSTORMS Robot Inventor for FIRST LEGO League competitions involves learning how to turn left and right with the robot. There are not precise turns. The robot will make mistakes, because that's what robots do. But nevertheless it is important to learn how to program the robot to turn. We are releasing an additional course that is focused only on programming and how to make the robot consistent in its behavior, but in this tutorial we stop on turning

With this video tutorial we start the course for LEGO MINDSTORMS Robot Inventor and how to successfully program the robot for FIRST LEGO League robotics competition. It is good to have SPIKE Prime or EV3 for the competition. But if you happen to have Robot Inventor, don't be discourage. It is still possible to participate and accomplish a lot with the set.

Without the use of the sensors, make sure that you are at least using "set movement acceleration to slow". In this tutorial we will demonstrate why and how this helps us improve the accuracy and consistency of the robot.

This is a 10 out of 10 tutorial demonstrating the accuracy of an active gear attachment that accomplishes the Treadmill mission from the FIRST LEGO League 2020 RePlay competition. When the robot is well aligned to the line before that it is easy for the robot to accomplish the mission. You will see how we make use of the friction of the wheel to rotate the mission model.

In this video tutorial we use an active attachment with a gears, built only form LEGO Mindstorms Robot Inventor parts, to accomplish the FIRST LEGO League 2020 Treadmill mission. The goal of the mission is to rotate the mission model for a couple of seconds so that a pointer makes a half circle rotation. What you will learn is a good principle to approach such missions.