
EV3 Phi. Make the robot consider cargo. Inertia & Acceleration
Robots could do chores for us and they must consider the load of the cargo or the robot could be damaged.
- #402
- 07 Apr 2017
Robots could do chores for us and they must consider the load of the cargo or the robot could be damaged.

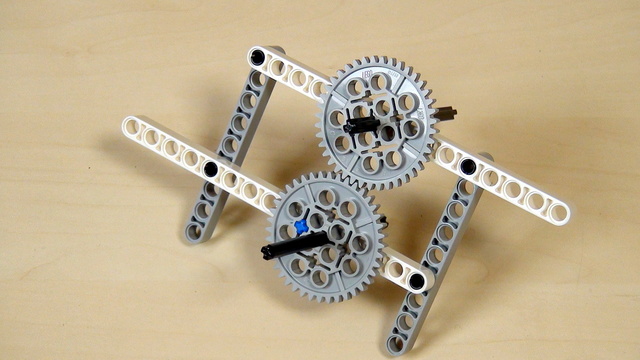
Calculate the number of rotations you have to do with the motor to rotate the final small 8 teeth driving gear wheel to 1.25 rotations?


We calculate the number of rotatios when a gear system is involved. The driving wheel will have to do a number of rotations for the driven wheel to rotate to a desired number of degrees. In our specific case when the driven gear wheel is rotate to about 90 degrees the legs will lift the robot.

Let us do a quick recap of the whole lifting mission and its solution

Note for the teacher on making the construction more stable, more durable and using beams for this.

Following the principles from the previous video, try to make the attachment that you've built, more stable and durable.

In this video we discuss the durability of the construction of LEGO robots and how do we make them more durable.

Here is our solution for preventing torsion and bending of the LEGO Mindstorms EV3 axles.

Recap on the attachments, their purpose and how you should use them.

Need to transfer circular into a linear motion. You need a rack. Here is an attachment with a rack for our box robot.

The important task before the solution. If you haven't done it already, then attach a new axle at the front of the robot and extend the construction with gear wheels and axles to reach the two legs at the two sides of the robot.

Construct two legs for both sides of the robot. The task for this video is to attach this two legs on both sides and to build a system of gears and axles that power those legs.

Sometimes the way an axle is placed is just not suitable for a certain attachment and you should transfer the motion to another axle a few LEGO units above the current.

This one is very special- an attachment that could lock itself on purpose while working.

Try to build the attachment following the instructions. Use it to actually solve a mission from any competition (like taking loops)

In this Episode, we create the next attachment for the box robot two. It is again a pinless attachment, attached to the frame that transfers the motion to a vertical axle.

In this Episode, we stop at the pinless attachments for the Box Robot 2 and especially for the constructing a frame. This frame is then used for further extending the robot with attachments.

The most stressed wheel in our system is the driven wheel. We've already fixed the problem with the driving wheel of the scissor mechanism and now it is time to look at the drive LEGO Mindstorms wheel.

Where is the math while turning? Is there any math involved? Should there be?

Here is the task for adding a beam on both sides of every gear wheel in your attachment.
The next important step when turning with a robot is to learn how to do an Arc turn.
One of the very common problems with the LEGO Mindstorms and LEGO Technic Gear wheels is then a tooth is skipped. In this video, I would like us to discuss this challenge and how do we solve it.

Spinning with the VEX EDR robot involves the use of both motors. The left and the right. Every robot with wheels could spin and this makes not exceptions.

It this episode we would present you with our attachment for lifting the robot.

How does this construction of VEX EDR turn? It has two motors. Let's start with turning right

Experiment with changing the orientation and direction of gear wheels. Here are part of the tasks that you should complete before moving forward with the course.

With this video tutorial, we start with Turns with the VEX EDR robot.