Video tutorials -
Filters:



WRO Junior-High 2015. Treasure Hunt. Part 4. Program With Arrays
We would continue from the previous program where we used variables and we would change this to arrays.
- #201
- 24 Apr 2016

WRO Junior-High 2015. Treasure Hunt. Part 2. Rules
We would look at the rules of the competition over our small model and we would start solving the field.
- #199
- 10 Apr 2016


How to use the distance sensor from LEGO Education SPIKE Prime
This tutorial demonstrates how a LEGO Education SPIKE Prime robot could stop when it reaches a wall. FIRST LEGO League competitions are held on tables that have border and it is sometimes useful to use the Ultrasonic sensor to detect the border and stop close to the border. The attachment uses Luly, a small LEGO Education SPIKE Prime competition robot with 3D building instructions as a robot base.
- #1712
- 26 Apr 2021



How to use Motion Sensor to accurately move forward with LEGO MINDSTORMS Robot Inventor
With this first tutorial on the Motion Sensor in the LEGO MINDSTORMS Robot Inventor course we demonstrate the basic algorithm for moving in a straight line with the Motion Sensor. From here all the other algorithms are modifications, and if you know the basic it will be easier to tweak the behavior for your particular challenge
- #1962
- 01 Nov 2022
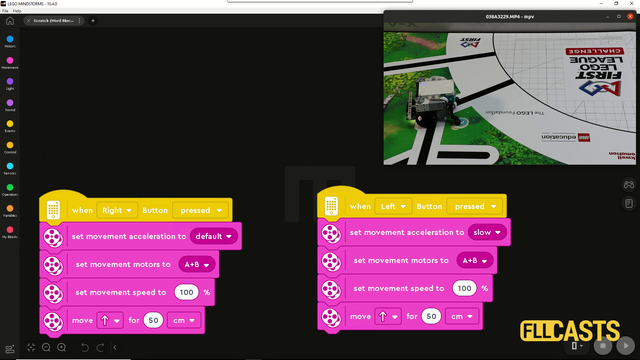
Accelerate and Decelerate with LEGO MINDSTORMS Robot Inventor
In this video tutorial we are demonstrating the impact of slow and fast acceleration on the robot. In the Scratch program there is an acceleration block for fast and slow acceleration. The robot behaves in different way. Let's explore them so that you know what to use for FIRST LEGO League competitions.
- #1959
- 31 Oct 2022

Improve accuracy of LEGO MINDSTORMS Robot Inventor with blocks to accelerate and decelerate
Without the use of the sensors, make sure that you are at least using "set movement acceleration to slow". In this tutorial we will demonstrate why and how this helps us improve the accuracy and consistency of the robot.
- #1960
- 01 Jan 2022

10 runs on how to move on an FLL competition field with LEGO MINDSTORMS Robot Inventor without sensors
Continuing from the last tutorial, we demonstrate the consistency and reliability of the robot when we don't user sensors. The result is pretty obvious - the robot is NOT consistent and reliable. It just makes a lot of mistakes
- #1956
- 03 Oct 2022

10 runs on robot accuracy when moving fast VS moving slow on an FLL Competition field with LEGO MINDSTORMS Robot Inventor
This is a tutorial with 10 runs - 5 of them are slow and 5 of them are fast and we measure how accurate the robot is each time. How consistent is it? Can it arrive consistently on a specific location on the field without the use of the sensors? The quick answer is - No, it can not. But let's see it life
- #1958
- 25 Oct 2022

10 runs on improve accuracy by accelerating with LEGO MINDSTORMS Robot Inventor
This is a 10 runs tutorial that demonstrates how the accuracy of the robot improves when we use slow acceleration vs fast or default acceleration. Note that the improvement is small. This is not an accurate and consistent robot. No. This is a robot that is all but accurate or consistent. It does not use sensors and you should use sensors. But it is a teaching/demonstration moment for everybody to seen what is it that you can expect if you don't use sensors.
- #1961
- 01 Nov 2022

How to move on an FLL competition field with LEGO MINDSTORMS Robot Inventor without sensors
This is the first video tutorial from our course on LEGO MINDSTORMS Robot Inventor programming. In this tutorial we will start with how do we move without sensors. We will demonstrate a simple program. Our hope with this tutorial is that you will see why moving without sensors is a bad approach.
- #1955
- 03 Oct 2022

Robot Accuracy when moving fast VS moving slow on an FLL competition field with LEGO MINDSTORMS Robot Inventor
In this video tutorial we use a LEGO MINDSTORMS Robot inventor robot and we do an experiment and a demonstration with it. We demonstrate what is the difference in the consistency and accuracy of the robot when we move slow and when we move fast. For FLL, WRO competitions there is always this balance between moving fast and moving slow.
- #1957
- 25 Oct 2022