Bag 13 - Truck, Airplane and Activators - FIRST LEGO League 2021-2022 CARGO CONNECT
These are instructions on how to build the:
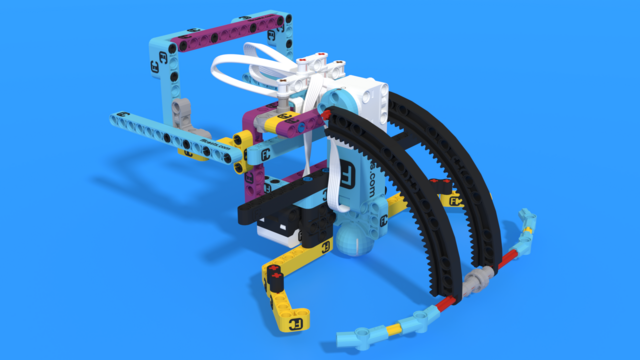
- Airplane
- Truck
- 2x Activators
You can find more building instructions and tips and tricks about the competition on this page.
- #1395
- 05 Sep 2021