
Mantissa, a LEGO Mindstorms EV3 mantis robot
A fearsome and dangerous robot. It will find a place to hide and patiently wait in ambush.
NB! This robot requres bluetooth connectivity, as its USB port is blocked in the construction.
- #680
- 20 Feb 2019
A fearsome and dangerous robot. It will find a place to hide and patiently wait in ambush.
NB! This robot requres bluetooth connectivity, as its USB port is blocked in the construction.

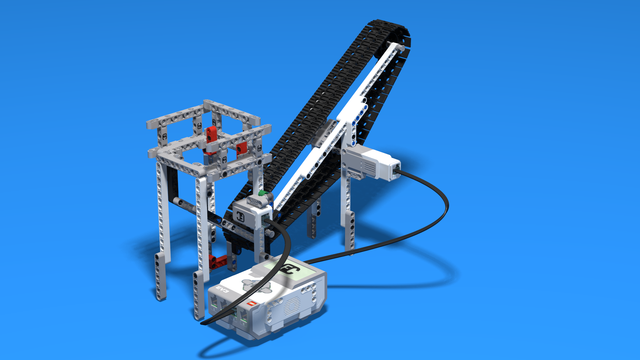
An awesome ski-jet robot, steering with a medium motor and powered by a single large motor. It also has a pair of inclined treads, making it especially well-suited for the harsh winter terrain.
*There is a mistake in this robot you will have to find. How would you make it work?

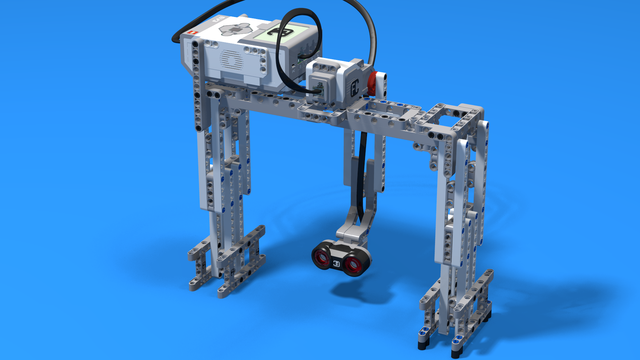
This is an 8 bar lifting robot. Way should I build this instead of Roberto bot you ask? Because it is... well... it lift thing straight up, it lift 'em higher, it's more beautiful than Roberto and is more bad ass looking than 4 bar lifting mechanism. OOoohhh, and one more thing it may use the same program as Roberto Bot With Four Bars Lifting Mechanism.
The program si at programs/hb5rj8-pesho-bot-with-two-bars-lifting-mechanism-controls-with-modkit.
Искал ли си някога да видиш колко бързо се движат количките ти с дистанционно? Или да си направите състезание за скорост по трудно трасе с някое приятелче? Може да си намерил точният робот за теб!
Радърфорд е един висок надлез, който има радар в себе си. Можеш да видиш точно колко е бърз предмет, отиващ към него, и още много!

Building instructions for the Formula 1 Racing Car, built with LEGO Mindstorms EV3. It can turn with the help of a small motor and is driven by two large ones.
An example program for using this robot could be found at: https://www.fllcasts.com/programs/692hkz-comet-program

Лего врата, използваща сензор за допир за език на бравата, за да знае кога е отворена. Има си стопер и даже издава добре познатия звук на скърцаща врата.

Компактен робот, който може да разбере дали има нещо върху него, използвайки сензор за допир.
Този робот има две функции:

Робот-стойка за телефон, който задейства аларма при кражба. Представлява плоча, стояща върху гума. Когато телефонът е сложен отгоре, тежестта му кара гумата да се сплеска и височината на конструкцията се променя. Сензорът за цвят долавя тези малки промени и задейства алармата.

This is a simple chassis that uses two motors to control the robot and two omni wheels at the back for greater maneuverability. It also have low center of the mass which makes it more stable for higher attachments.
The program for this robot is at programs/uxgw6b-roberto-bot-chassis-controls-with-modkit
Уитики идва от Маори и означава колан (на поточна линия).
Роботът използва среден мотор, за да върти веригата и цветен сензор, за да разбере цвета на топчето, което влиза в него. Веригата на този робот е съставена от 56 пластини.

Това са модули за свободно строене на робот, който да сортира пластмасови отпадъци, както е показано в ниво Е. Двата модула не са свързани никъде, а са сложени един до друг, за да ви е по-лесно да си представите робота.

This robot is robot based on Roberto Chassis. It is equiped with a pushing rack. You can add something to the rack so it can do some other jobs.
The program for this robot is at programs/ajk7i1-roberto-with-rack-for-pushing-to-the-left-and-right-side-vex-iq-robot.

This construction demonstrates one way of using а rack with a gear wheel. It allows to turn circular motion in to a liniar one.
Минтонет (от англ. Mintonette) идва от името на една от първите версии на волейбол.
Роботът може да се движи само настрани, без да завива, с помощта на един голям EV3 мотор. Друг голям мотор се използва, за да изстрелва топката. Има и сензор за разстояние, с който може да засича друг робот, на който да подаде топката, или кош, в който да вкара топката.

Минтонета (от англ. Mintonette) е името на една от първите версии на волейбол.
Роботът използва два сензора за допир с които да движи оръдието си наляво и надясно. За да стреля използва цветен сензор. На оръдието си има голям мотор отговорен за стрелбата и среден мотор който мести оръдието.

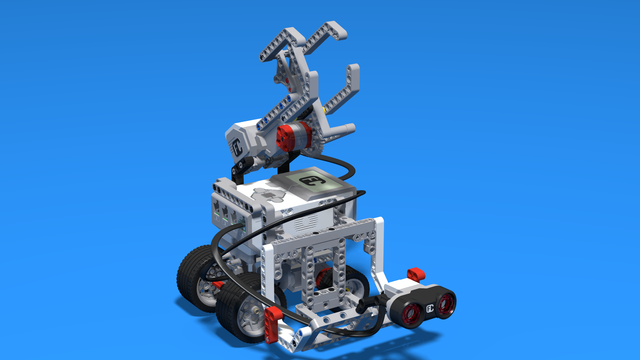
Roberto is one handed robot with four bars mehanizm. He is more durable then Pesho.
This robot is based on Roberto Chassis.
Program for this robot available here.

Писцис от Латински (Piscis) означава риба.
Писцис е LEGO робот риба, който използва много интересен механизъм за завиване. Опашката му използва среден мотор, за да се мести наляво и надясно. На края ѝ има две колела. Когато роботът завърти опашката си, тези колела го направляват и той завива. Този механизъм е много любопитен и наподобява начина, по който рибите завиват.
Писцис използва голям мотор, за да върви напред и назад. Сензорът за допир отпред му помага да усети опастност и да се прибере обратно в кораловия риф.
Внимавайте със зъбните колела, те хапят!

Инструкции за конструиране на робот мида. Роботът е много близък до Мидас - ЛЕГО мида робот. Основната разлика е в това, че моторите са обърнати.
Роботът използва 2 Mindstorms EV3 големи мотора, за да се отваря и затваря. Използва стоманено топче за перла и веждите му могат да се мърдат, за да се променя изражението му.

Умджахо, от езика на племето Зулу, означава състезание.
Роботът има три сензора: за допир, за цвят и за разстояние. Използва сензора за допир, за да разбере, кога да тръгне; сензора за цвят, за да следва линия и сензора за разстояние, за да спре, когато засече робот пред себе си.

Dwell is a car built with a LEGO MINDSTORMS EV3 set. It uses the medium motor for powering the back wheel and one more medium motor for rotating the front wheels and thus turning. Of course, there is a differential at the back.