
Мак - камионче от ЛЕГО Mindstorms EV3
Инструкции за конструиране на камионче от ЛЕГО. Използва среден мотор за насочване на предните колела и голям мотор за задвижване на едно от задните колела.
- #860
- 17 Aug 2019
Инструкции за конструиране на камионче от ЛЕГО. Използва среден мотор за насочване на предните колела и голям мотор за задвижване на едно от задните колела.

Франческо 2 е вдъхновен от робота Франческо.
Инструкции за конструиране на проста LEGO количка, използваща голям мотор за завъртането на предните колела и среден мотор с диференциал за задвижване на задните колела. За разлика от оригиналния Франческо, Франческо 2 има предвидена позиция за заключващ механизъм на диференциала му.

Building instructions for a Light LEGO Mindstorms EV3 Competition Robot that could be used in LEGO Robotics competitions. Compared with previous versions of this robot, this one has a Gyro Sensor.

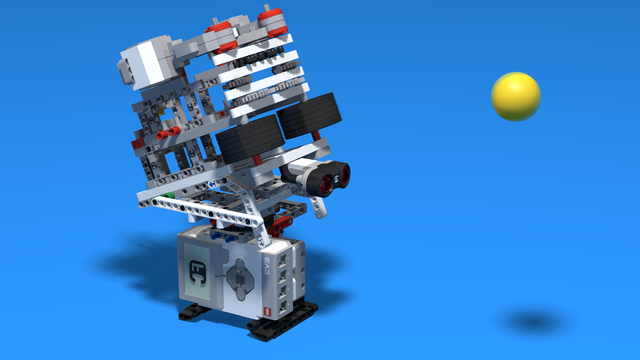
Икнатир на арменски означава самолетоносач.
Роботът е направен да прилича на самолетоносач. Той изстрелва хартиени самолетчета с две бързо въртящи се колела. Колелата са свързани за зъбни предавки за скорост, които са свързани за два големи мотора. Тези мотори са свързани към един среден, който може да ги движи към самолета за да може когато го докоснат да се въртят с пълна скорост. Самолетът се поставя на писта, за да може да се изстреля перфектно. Отстрани на робота има ръчка с Жироскопичен сенор, която се иползва за изстрелване на робота.
Уйлам е робот, който симулира буря за кораби. Използвани са две бутала задвижвани от един голям мотор и разместени точно на 90 градуса за да създадат клатене подобно на големи вълни. Самият кораб се състои от среден мотор свързан с въртяща плоча и жироскопичен сензор. Целта на този робот е да разгледа кое е най-доброто положение на кораб спрямо вълните, така че да се справи с вълнението на морето.

Ролбар е устройстово което служи за измерване на дължина. Предимството му е че може да измерва и криви линии.
Проектиран е за работа с дясна ръка, но може да се промени да пасва и за лява ръка.
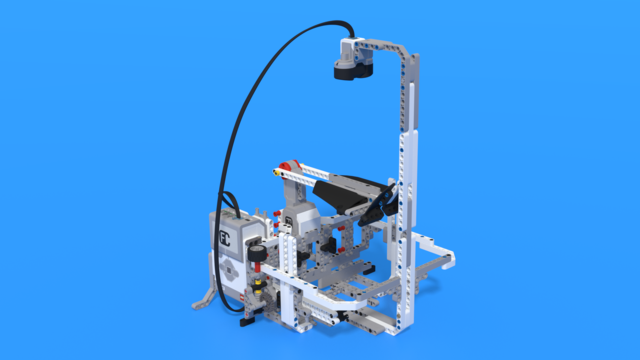
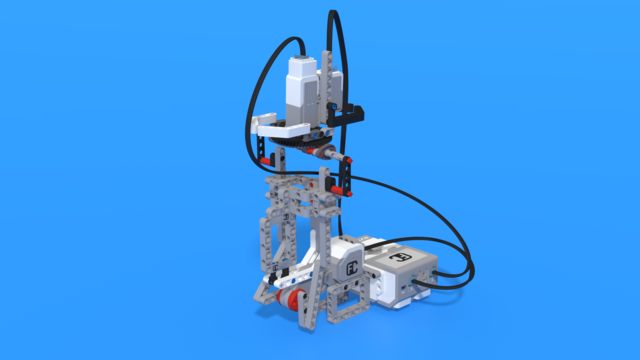
Лабораторията е робот, който ще провери уменията ви по програмиране. Трябва да измерите обема на балона само чрез стойностите измерени от сензорите.
Конструкцията има вентил, с който можете да изпускате балона с различна скорост.
Как точно се поставя балонът в робота е пояснено в този урок.

Джен идва от Джендема, името на българска рок група от 80-те, известна с песента си "Водно колело".
Роботът използва два големи мотора, но вместо колела, използва четирикраки гребла, което го прави да прилича на Водно колело. Също така се плъзга по пода, точно като истинскo такова във водата.
Заради интерeсния механизъм за движение, робота използва жироскопичен сензор за да се движи в права линия.

Барко от испански (Barco) означава лодка.
Роботът е направен да прилича на платноходен кораб. За модел е използвана двумачтова шхуна. Това е малък, лек и бърз кораб. Типично за шхуните е да имат тези четириъгълни платна, като на снимката, на главната мачта. Платната са направени от ЛЕГО техник панели. За да се придвижва робота използва два големи мотора с гуми на тях. В задната част на робота има жироскопичен сензор, който помага с маневрирането.

Хрутур, от исландски, означава овен.
Роботът прилича на овен. Той използва зъбни колела за постигане на повече скорост и съответно по-силни сблъсъци. Използва също и два големи EV3 мотора, за да се движи. Отпред има сензор за разстояние, който е с декоративна цел, но може да се използва, както вие пожелаете.
Минтонет (от англ. Mintonette) идва от името на една от първите версии на волейбол.
Роботът може да се движи само настрани, без да завива, с помощта на един голям EV3 мотор. Друг голям мотор се използва, за да изстрелва топката. Има и сензор за разстояние, с който може да засича друг робот, на който да подаде топката, или кош, в който да вкара топката.

Минтонета (от англ. Mintonette) е името на една от първите версии на волейбол.
Роботът използва два сензора за допир с които да движи оръдието си наляво и надясно. За да стреля използва цветен сензор. На оръдието си има голям мотор отговорен за стрелбата и среден мотор който мести оръдието.

This robot is a simplified spinoff of the Box Robots (Box Robot 1 and Box Robot 2). It may be build with a single set, but it will require extra technic beams 7x5 with open centers.
The name of the robot - "Squmo" is derived from the ancient tradition of connecting two words to make on and hense - "Square sumo" because "Squmo".

This one is also fast. It has assistant wheels, but only to keep the balance. It is built with LEGO Mindstorms EV3 sets with the use of one additional Medium Motor.
Join the course A robot a "day" keeps the questions awake where we will further discuss the motors, how to build them and what tasks to accomplish with them.

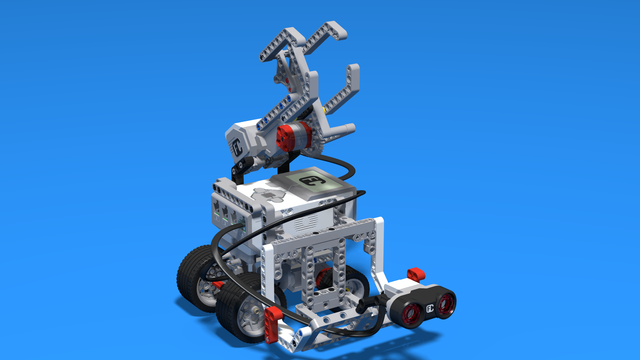
Целта на тези инструкции е да ви помогнат да построите ЛЕГО Mindstorms EV3 робот без колела. Трябва вие сами да помислите как точно да поставите колелата. Какви колела бихте използвали отпред? Как ще построите третото колело? Ето тук има някои препоръки за това как да построите третото колело - 1, 2, 3, 4
Можете да добавите хващач към тази конструкция по инструкциите тук.
Инструкции за конструиране на количка от Лего, която може да изтрелва 40мм пластмасови топки за пинг понг. Роботът се задвижва от два големи EV3 двигателя, а приставката, изстрелваща топките, от среден EV3 мотор. Роботът може да носи до 6 топки и разполага със сензор за разстояние.

Инструкции за построяване на Катапулт от ЛЕГО Mindstorms EV3. Роботът има мотор, съединител, с който ръчно се контролира кога катапултът да стреля, и сензор за допир, който позволява автоматично зареждане. Долната рамка е махната, което означава, че роботът няма да може да се върти. В същото време обаче без нея катапултът става достатъчно малък, за да може да се построи по време на занятие.

Here is another great example of a large multi-purpose attachment used in FIRST LEGO League competitions. This one is specifically for the 2017-2018 Hydrodynamics competitions and is doing a number of missions. (01) Pipe removal, (06) Water Treatment and (08) Manhole cover.
The attachment consists of two parts. The first part is placed on the robot while the second part is in front of the robot and the robot pushes it. While working on the field the robot leaves the second part on the Water Treatment plant and when returning back collects it back and returns to base.
The goal of the attachment is for you to build it and experiment with it with the existing field. Use Box Robot 2 as a robot base on which to add the attachments.

Probably the largest multi-purpose FLL attachment at FLLCasts. These attached is doing a number of missions at once. 4 of them. You attach it to the robot and start the program. The robot moves and accomplishes a number of missions using only this attachment. At it also has a lot of parts. It is quite large and you can not build it from a single set. But that's ok because you are preparing for a competition, right?
