Building Instructions -
Filters:

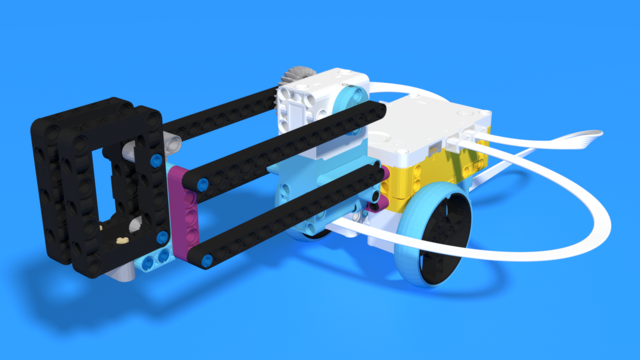
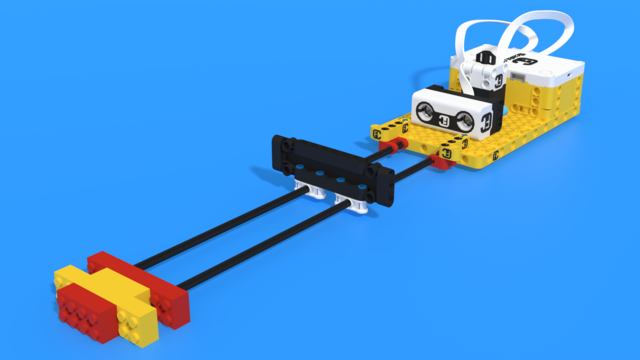
Onwards and Cupwards: LEGO SPIKE Prime Cup-Lifting Robot
This robot is designed to lift a cup smoothly while keeping it upright. With a motor attached to the side of the Hub, the robot can raise the cup to different angles.
With a few adjustments, you could even replace the LEGO cup and try lifting a real one. Just be careful with liquids - the robot doesn’t enjoy drinks as much as you do!
- #4442
- 30 Mar 2026
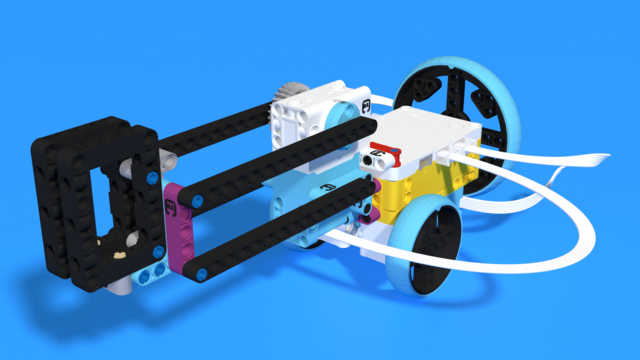
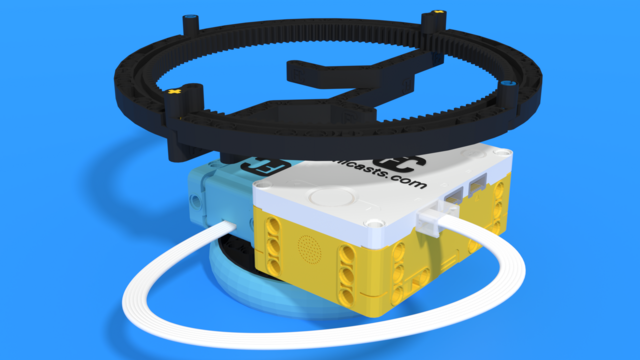
Onwards and cupwards with wheels - LEGO SPIKE Prime cup lifting robot
This instruction adds to the Onwards and cupwards robot.
- #4409
- 27 Mar 2026
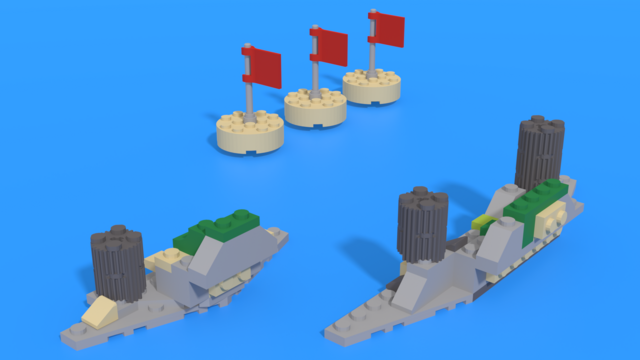
LEGO Storage Box with a Long Body
This storage box is designed for use in robot missions. Its long shape makes it easy to grab and transport using a wide variety of robot attachments and grabber designs.
- #4376
- 25 Mar 2026

Racer - LEGO SPIKE Prime race car
Building instructions for a steering car. The front wheels are steered by a medium motor, while both rear wheels are driven by a single large motor.
- #4343
- 24 Mar 2026

Минто - LEGO SPIKE Prime волейболен робот
Минто (от англ. Mintonette) идва от името на една от първите версии на волейбол.
Този робот може да се движи само напред и назад, използвайки един среден мотор. Може да изстрелва топка, използвайки друг мотор и готин механизъм! Има мрежа, за да може да хваща топките на други роботи!
- #4310
- 21 Mar 2026

Сого - LEGO SPIKE Prime щафетен робот
Сого означава игра на галисийски
Роботът се движи с помощта на два средни мотора. Той има сензор за разстояние отпред, за да засече следващия робот, и сензор за сила отзад, за да засече предишния робот в щафетата. Сглобете два или повече и можете да имате цяла щафета!
- #4277
- 05 Mar 2026

Мален - LEGO SPIKE Prime робот за развален телефон
Мален произлиза от Малентенду, което на френски означава недоразумение.
Роботът има цветно колело с 4 цвята отзад и сензор за цвят отпред. Когато покажете цвят на цветния сензор, робота може да го покаже обратно. Можете да свържете няколко такива робота, за да направите развален телефон!
- #4244
- 23 Feb 2026

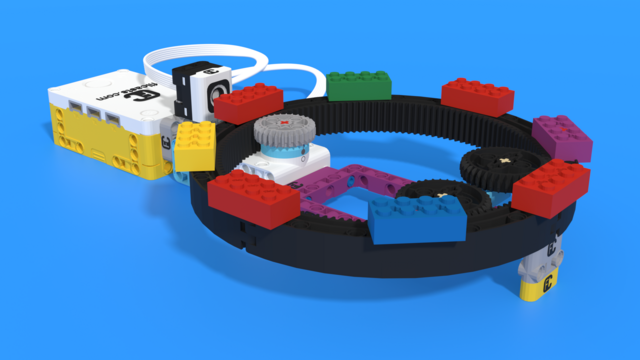
Леви - LEGO SPIKE Prime сортиращ робот
Леви произлиза от левитама, което на естонски означава „разпределям“.
Този робот използва цветен сензор, за да открие цвета на пластмасова топка. След това, според цвета на топката, роботът я сортира на правилната страна.
- #4211
- 25 Jan 2026
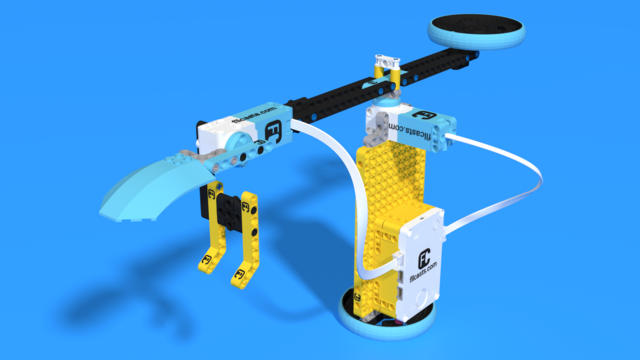
Грус - LEGO SPIKE Prime робот кран
Грус, от латински, означава Кран.
Кранът използва един мотор, за да завърти ръката, и един мотор, за да държи топката. Първо трябва да балансирате стрелата? Какво можете да добавите към нея?
- #4178
- 25 Jan 2026


Пага - LEGO SPIKE Prime робот цигулка
Пага идва от известния цигулар Николо Паганини.
Роботът е направен да прилича на цигулка. Той пуска по-висок тон колкото по-бързо се движи мотора. Да видим дали ще се справите да свирите на него!
- #3552
- 16 Sep 2025
Хромаграф - LEGO SPIKE Prime робот грамофон
Хромаграф е игра на думи с оригиналното име на грамофона "Фонограф", от Гръцки фоно - звук, граф - писане и хрома - цвят.
Роботът работи подобно на грамофон. Има въртящ се "диск" с цветни тухли които се четат от сензора за цвят. Роботът възпроизвежда звук спрямо цвета, който вижда сензора. Можете ли да направите мелодия?
- #3554
- 16 Sep 2025
Карлос - LEGO SPIKE Prime робот китара
Карлос, кръстен на Мексиканския китарист Карлос Аугусто Алвес Сантана.
Роботът използва сензора за разстояние, за да определи честотата на звука и сензора за сила, за да пусне звука. Да видим дали ще изпилиш солото на него!
- #3551
- 16 Sep 2025

Симфо - LEGO SPIKE Prime робот музикална кутия
Симфо е кръстен на Симфониум, първата компания, която произвежда музикални кутии.
Роботът използва цветен сензор, за да засече дали кутията е затворена. Когато засече, че е отворена, робота пуска музика и върти мотора вътре. Можете да построите каквото пожелаете върху него!
- #3782
- 16 Sep 2025
Мело - LEGO SPIKE Prime диджей сет робот
Мело идва от името на известния диджей "Marshmello".
Този робот работи като половин диджей сет. Той забързва или забавя мелодия спрямо завъртането на мотора. Можете ли да направите як ремикс на него?
- #3553
- 16 Sep 2025

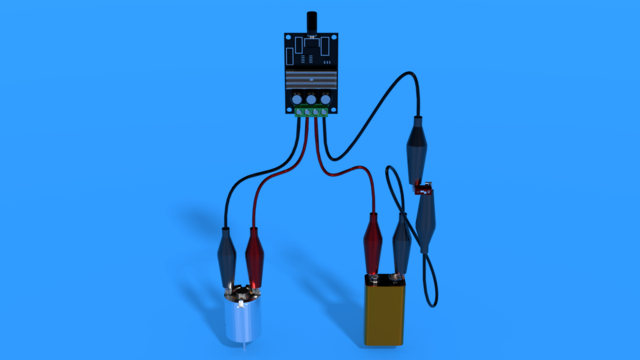
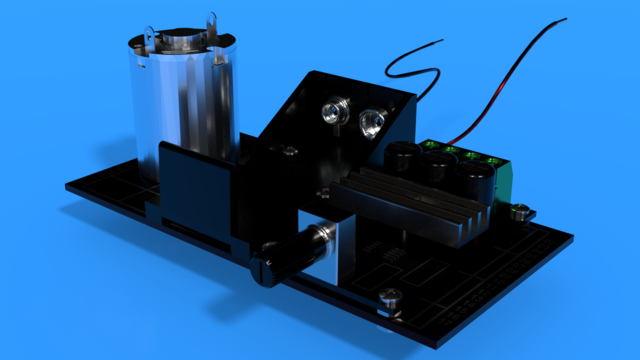
LED strip display program
Download button at the bottom.
This is a program we created for the LED strip display course.
#include <Adafruit_NeoPixel.h> #define LED_COUNT 20 #define StripPin A2 #define HallEffectSensorPin 6 #define HallEffectGNDPin 5 #define HallEffectVCCPin 4 int startSeconds = 20; int startMinutes = 10; int startHours = 1; int secondsArrow; int minutesArrow; int hoursArrow; int arrowPosition; int hallSensorPastState = LOW; int hallSensorRead; int timeForOneRotation = 1; unsigned long RPMTimer = millis(); Adafruit_NeoPixel leds = Adafruit_NeoPixel(LED_COUNT, StripPin, NEO_GRB + NEO_KHZ800); int color[3] = {255, 100, 150}; int secondsColor[3] = {255, 0, 0}; int minutesColor[3] = {0, 255, 0}; int hoursColor[3] = {0, 0, 255}; void setup(){ pinMode(HallEffectSensorPin, INPUT); pinMode(HallEffectGNDPin, OUTPUT); pinMode(HallEffectVCCPin, OUTPUT); digitalWrite(5, LOW); digitalWrite(HallEffectVCCPin, HIGH); leds.begin(); leds.setPixelColor(19, color[0], Color[1], color[2]); } void loop(){ RPMUpdate(); ClearLedsWithoutTheLastOne(); arrowPosition = StateFrom60(); secondsArrow = ((int) floor(( millis() / 1000) + startSeconds) % 60); minutesArrow = ((int) floor(( millis() / 60000) + startMinutes) % 60); hoursArrow = ((int) floor(( millis() / 3600000) + startHours) % 12) * 5; if (arrowPosition == secondsArrow){ for (int i = 0; i < LED_COUNT - 3; i ++){ leds.setPixelColor(i, secondsColor[0], secondsColor[1], secondsColor[2]); } } if (arrowPosition == minutesArrow){ for (int i = 0; i < LED_COUNT - 6; i ++){ leds.setPixelColor(i, minutesColor[0], minutesColor[1], minutesColor[2]); } } if (arrowPosition == hoursArrow){ for (int i = 0; i < LED_COUNT - 10; i ++){ leds.setPixelColor(i, hoursColor[0], hoursColor[1], hoursColor[2]); } } if (arrowPosition % 5 == 0){ leds.setPixelColor(18, color[0], color[1], color[2]); leds.setPixelColor(17, color[0], color[1], color[2]); } leds.show(); } void RPMUpdate(){ hallSensorRead = digitalRead(HallEffectSensorPin); if(hallSensorRead != hallSensorPastState){ if(hallSensorRead == HIGH){ timeForOneRotation = millis() - RPMTimer; RPMTimer = millis(); hallSensorPastState = HIGH; } else{ hallSensorPastState = LOW; } } } void ClearLedsWithoutTheLastOne(){ for(int i = 0; i < LED_COUNT - 1; i ++){leds.setPixelColor(i, 0);} } int StateFrom60(){ return (int)floor(((millis() - RPMTimer) * 60) / timeForOneRotation) % 60; }
- #3749
- 13 Sep 2025